Invited Talks
Eric Forgoston: Noise-Induced Switching and Optimal Navigation in Flows
Noise plays a fundamental role in a wide variety of physical systems. In recent years, researchers have identified situations where noise can induce a large fluctuation that leads to switching between metastable states of the system. After providing an overview of the theory needed to understand the dynamics of rare events for stochastic ODEs, I will demonstrate how large fluctuation theory may be applied for controlling autonomous agents in a stochastic ocean-like flow.
Evangelos Theodorou: What does it mean to control a stochastic process?
In this talk I will try to address this question and demonstrate its critical relevance to robotics science and systems. I will present new formulations for optimal control of robotic systems under uncertainty and show the implications of these formulations to stochastic trajectory optimization and state estimation. This talk will provide an overview of difference representations of uncertainty together with recently developed algorithmic frameworks for stochastic control.
Gregory Chirikjian: Stochastic Models and Small Robots
Brownian motion has long been a subject of study in physics and chemistry. As a consequence, it is commonly known that the covariance of the position of a translationally diffusing particle grows linearly with time. These same ideas have been applied in estimation and stochastic control of systems evolving on Euclidean space. But what is the concept of a 'mean' and a 'covariance' on a non-Euclidean space? This talk will review stochastic differential equations for rigid-body systems and the concepts of mean and covariance of probabilities on the group of rigid-body motions (which is a non-Euclidean space) in order to model pose errors of small robots and also to describe the pose distributions of swarms of small robots. Sensor calibration problems will also be discussed as time permits.
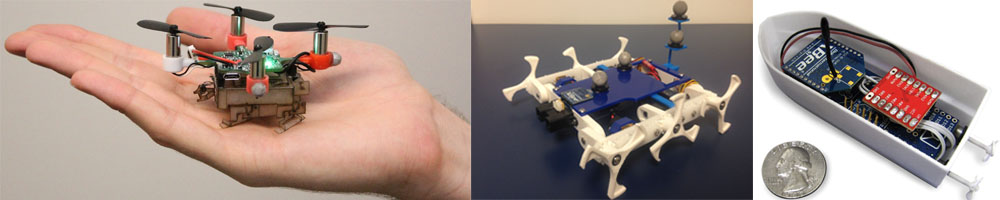
Konstantinos Karydis: Learning Uncertainty through Stochastically-Valid Templates
Robot motion planning and control in real-world settings is hindered, in part, by uncertainty. Dealing with uncertainty is difficult as it invalidates the performance guarantees available in deterministic cases, while its precise effect on motion cannot be predicted. Further, (autonomous) robot performance often emerges through the interaction of multiple components, mainly including action, perception, and the environment, each entailing different aspects of uncertainty. This talk will focus on how to learn uncertainty in action. The thesis is that low-dimensional models that are able to capture salient robot behaviors (a.k.a. templates) can be enhanced with appropriate probabilistic tools in order to generate stochastic models with provable guarantees of validity. Such stochastically-valid templates may serve as a key building block toward developing a general framework that can be used to quantify the effect of uncertainty on robot motion, and recover some performance guarantees for achieving motion tasks. Examples from the realm of small-scale legged and aerial robots will be discussed.
Spring Berman: Control and Estimation Techniques for Robotic Swarms with Stochastic Behaviors
In recent years, there has been an increasing focus on the development of robotic swarms that can perform tasks over large spatial and temporal scales. We are addressing the problem of reliably controlling swarms in realistic scenarios where the robots lack global localization and prior data about the environment. As in natural swarms, the highly resource-constrained platforms would be restricted to local information about swarm members and features that they randomly encounter in the course of exploration.
We are developing a rigorous control and estimation framework for swarms that are subject to these constraints and are deployed in dynamic, unstructured environments. This framework will enable swarms to operate largely autonomously, with user input consisting only of high-level directives that map to a small set of robot parameters. We use stochastic and deterministic models from chemical kinetics and fluid dynamics to describe the robots’ roles, task transitions, spatiotemporal distributions, and manipulation dynamics at both the microscopic (individual) and macroscopic (population) levels. In this talk, I will describe our work on various aspects of the framework, including strategies for dynamic task allocation, environmental mapping, scalar field estimation, boundary coverage, and ant-inspired cooperative manipulation. To validate these techniques, we are building a swarm of small manipulator-equipped robots, called “Pheeno,” that are designed to be low-cost, customizable platforms for multi-robot research and robotics education.
Nora Ayanian: Using Online Games to Inspire Stochastic Distributed Multirobot Controllers
Humans are quite good at coordination, due to our computational, communication, and sensing capabilities, but also due to diversity. In human groups, order emerges because some humans are better at some tasks than others. This may lead one to ask: Can we get teams of robots to coordinate like humans? But robots have considerably limited computation, communication, motion, and sensing capabilities. Instead, then, the question we might want to ask is: Can humans coordinate effectively under robot-like conditions?
We have attempted to answer this question by conducting investigations on the ability of humans to solve challenging collective coordination tasks in a distributed fashion with limited perception and communication capabilities similar to those of a simple ground robot. In this talk, I will motivate this research and highlight some interesting observed behaviors, including distinct traits in the human behaviors. Preliminary analysis suggests a set of diverse, stochastic controllers learned from human behavior may help solve some challenging multirobot tasks in a distributed way.
Mike Rubenstein: Lessons learned from a thousand robot swarm
Creating a hardware system for large robotic swarms is an open challenge; cost and manufacturability pressure hardware designs to be simple with minimal capabilities, while algorithm design favors more capable hardware. The robot design must balance these factors to create a simple robot that is, at the same time, capable of performing the desired behaviors. In this talk, I will discuss the many challenges associated with creating a thousand robot swarm of centimeter scale robots and the implications this has for creating even larger, more capable swarms in the future.
Cynthia Sung: Modeling and Design of Small-Scale Folded Robots
In the push to make robots smaller and more lightweight, origami-inspired approaches have emerged as a fast and accessible method of fabrication and assembly with the ability to create robots with many modes of operation. Foldable robots are created by cutting and creasing a flat sheet into a robot's 3D body. The robot's geometry, mechanical robustness, and degrees of freedom all come from the structure of the folded shape.
However, folding robots introduces challenges during both design and operation, meaning that the great majority of these robots have been manually tuned over multiple iterations of experimentation. Since every fold is a potential degree of freedom, these structures can be difficult to analyze and model. In this talk, I will discuss some of our methods for computationally modeling and designing folded robots.
In particular, we consider how modularity of design can be used to simplify analysis. Modules forming the basic building blocks for robotic designs can be composed into more complex structures whose overall functionality can be inferred. We have built a system to allow designers to compose and test robots at a kinematic level in a virtual environment in order to streamline the design process, and we have created a variety of folded robots at scales ranging from 1 cm^2 to 1 m^2 using these methods.
Mike Tolley: Modeling and Control of Robots that Self-Assemble by Folding
Nature frequently employs self-assembly by folding for fabrication. From very small scales where proteins fold from linear strings of amino acids, to larger scales where organs fold from sheets of cells and plant leaves and insect wings deploy by folding or unfolding. The ancient Japanese art of origami also uses folding to form three dimensional structures from sheets of material. Inspired by these examples, Prof. Tolley and the UC San Diego Bioinspired Robotics and Design Lab seek to develop new approaches to the fabrication, modeling, and control of robotic systems, employing folding for assembly or deployment. This talk will discuss recent results and challenges in the development of self-assembling robots.